Фрезерный станок с ЧПУ (CNC) на базе ручного фрезерного станка "Корвет-414". Шаговые двигатели. Принцип работы шаговых двигателей.

Данная серия страниц рассказывает, как самостоятельно переделать ручной фрезерный станок во фрезерный станок с Числовым Программным Управлением (ЧПУ). Управляющая программа - "MACH3". Переделка велась методом "проб и ошибок", тем не менее, желаемый результат все же был достигнут.
Статья разбита на несколько страниц, каждая из которых дает подробное описание конкретных компонентов системы:
Общее описание станка и его переделки под ЧПУ. На странице представлено общее описание фрезерного станка "Корвет-414" и описание переделки его механической части;
Электрическая часть. На странице описано размещение электрооборудования внутри переделанного под ЧПУ станка;
Шаговые двигатели (ШД) (эта страница, просто читайте дальше).
Эта страница рассказывает о шаговых двигателях, примененных для переделки фрезерного станка "Корвет-414" под ЧПУ. Представлены фотографии шаговых двигателей в разобранном состоянии и дано краткое описание их принципа действия.
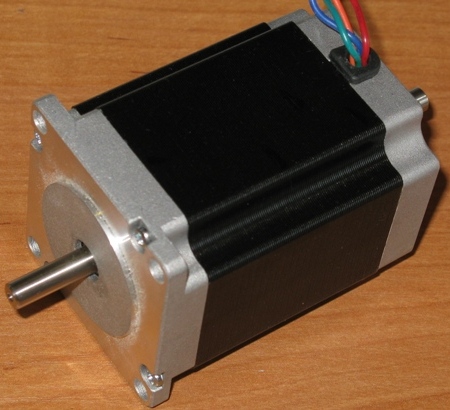
Чтобы станок "Корвет-414" мог сам фрезеровать детали по заданной программе, ручные "вертушки" управления осями станка были заменены на шаговые электроприводы. В качестве них были использованы шаговые двигатели PL57H76-3.0-4 с редукторами 1:5 (были куплены в компании "PURELOGIC"):
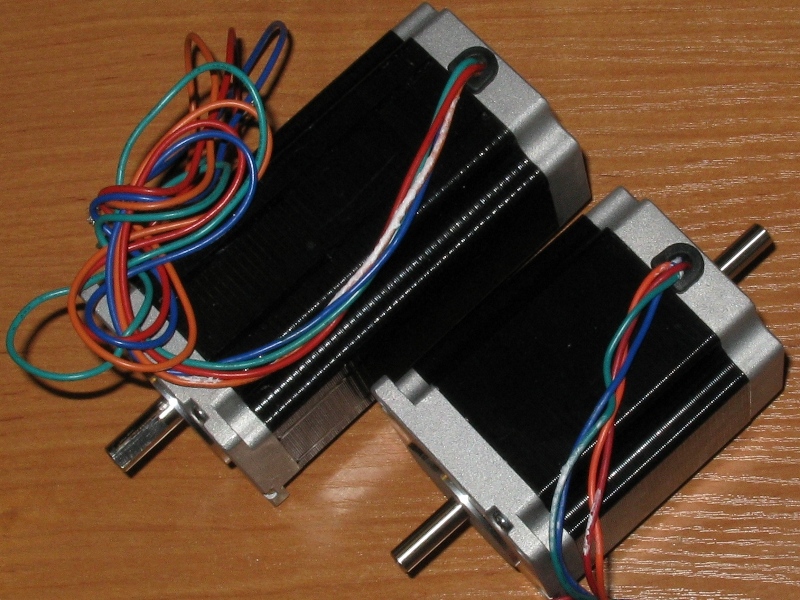
Однако, еще задолго до переделки фрезерного станка "Корвет-414" под ЧПУ, мною были приобретены два шаговых двигателя PL57H110-4.0-4 и PL57HD76-3.0-4 (появилась идея переделать под ЧПУ имеющийся токарный станок "Корвет-403", но она так и не была реализована):
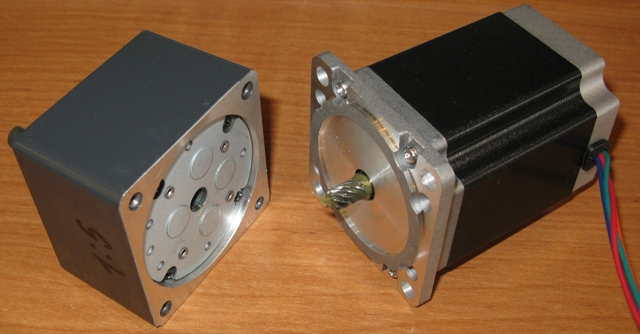
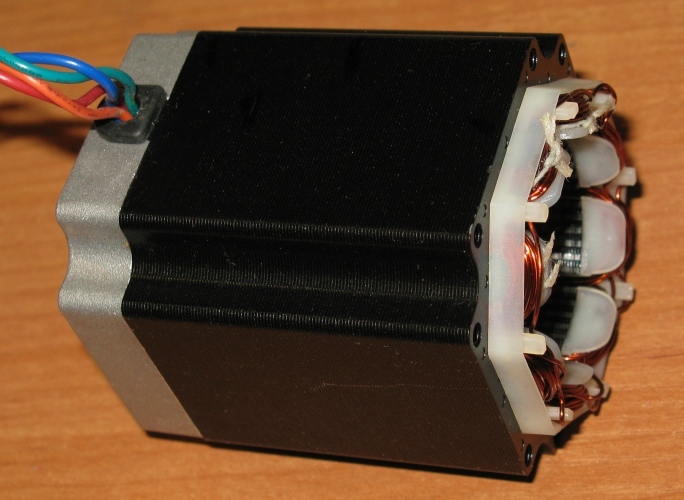
Оба шаговых двигателя были разобраны, чтобы посмотреть, что же там внутри. Внутри оказались:
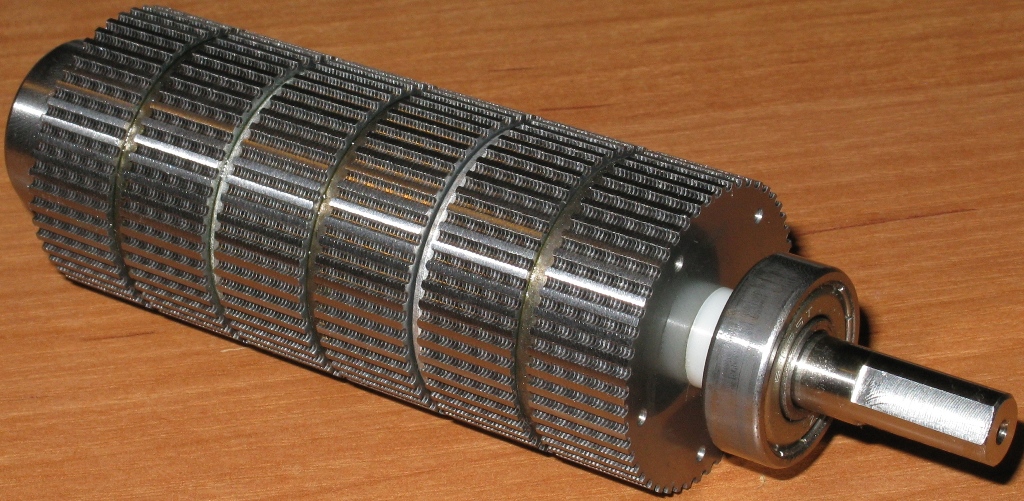
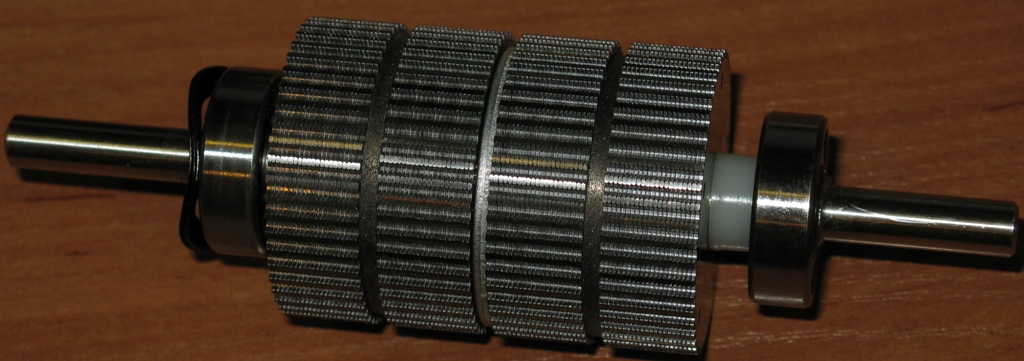
Роторы - состоят из нескольких одинаковых секций, число секций зависит о размеров шагового двигателя. Так, ротор двигателя PL57H110-4.0-4 содержит три секции:


а ротор шагового двигателя PL57HD76-3.0-4 содержит только две секции:
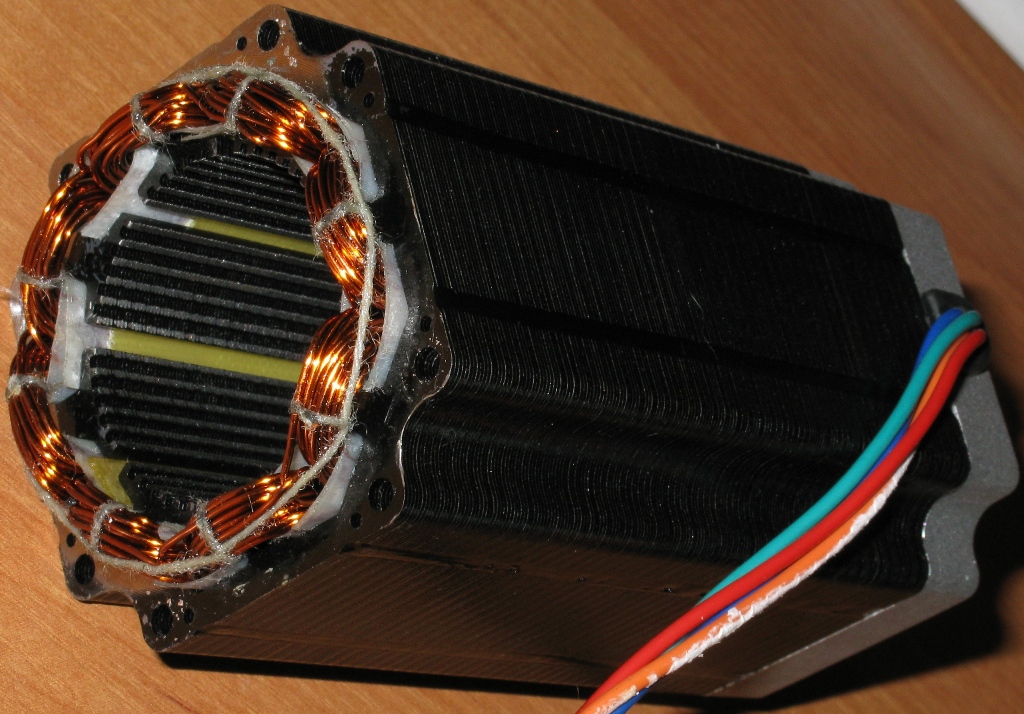
Статоры устроены однотипно. Отличие лишь в толщине проволоки - у PL57H110-4.0-4 она чуть толще, а у PL57HD76-3.0-4, соответственно, чуть тоньше:
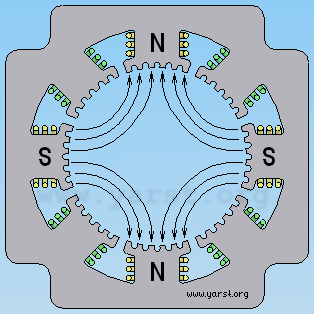
Как же это работает? Чтобы это понять, сначала рассмотрим очень упрощенную схему магнитной части шагового двигателя. Такой двигатель имеет всего 4 шага на один оборот ротора:
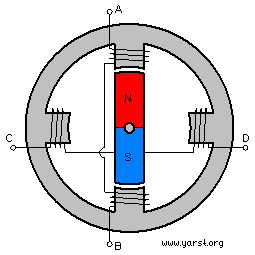
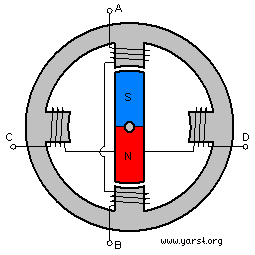
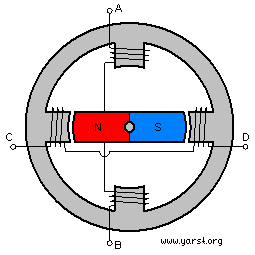
На статоре расположены две группы обмоток A-B и C-D, ротор - постоянный магнит. В отсутствие тока в обмотках ротор-магнит "примагничивается" к полюсам статора и может занимать четыре устойчивых положения:
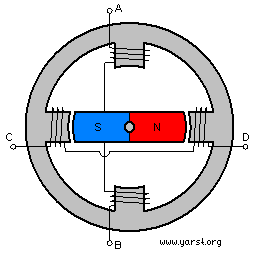
Эти устойчивые положения хорошо ощутимы, если попробовать провернуть руками ротор шагового двигателя (в собранном виде, конечно).
У двигателя есть две абсолютно одинаковые группы обмоток: A-B и C-D. Пропуская через них ток определенной величины и определенного направления, мы можем намагничивать сердечник статора по своему усмотрению, и это буде вызывать изменение положения ротора-магнита.
Шаговые двигатели переделанного под ЧПУ фрезерного станка "Корвет-414", управляемые драйверами шаговых двигателей, работают в полушаговом режиме. Это значит, что рассматриваемый нами гипотетический шаговый двигатель, имеющий только четыре устойчивых состояния, сможет совершать восемь шагов на один полный оборот ротора, т. е. в два раза больше.
Переходя к практическим цифрам, шаговые двигатели PL57H76-3.0-4, примененные на переделанном под ЧПУ фрезерном станке, имеют 200 устойчивых состояний, но в полушаговом режиме могут совершать 400 шагов на один оборот ротора. Т. е. точность позиционирования осей станка возрастает в 2 раза по сравнению со "стандартными" значениями для данных шаговых двигателей.
Как же это работает? Рассмотрим поэтапно, как происходит вращение шагового двигателя в полушаговом режиме, и как и какие токи мы при этом должны пропускать через его обмотки.
Работу шагового двигателя (как нашего гипотетического, так и реального) можно разбить на повторяющиеся "участки". Каждый "участок" содержит четыре различных состояния двигателя (в полушаговом режиме - восемь различных состояний). После прохождения этих состояний начинается следующий "участок" и все повторяется сначала.
Для нашего гипотетического шагового двигателя будет только один такой "участок" из четырех (восьми) состояний на один оборот ротора. В реальном шаговом двигателе таких "участков" 50.
Драйвер шагового двигателя имеет вход сигнала "ШАГ" для управления вращением шагового двигателя. При поступлении очередного импульса сигнала "ШАГ", драйвер дает нужные токи в нужные обмотки двигателя и переводит его в следующее состояние внутри текущего "участка". Когда все состояния текущего "участка" заканчиваются, начинается первое состояние следующего "участка" и все повторяется сначала. Т. о., драйвер шагового двигателя, работающий в полушаговом режиме, отрабатывает 8 различных состояний, после чего все начинается сначала: 1-2-3-4-5-6-7-8 - 1-2...
Вернемся к нашей гипотетической модели шагового двигателя и рассмотрим его работу внутри одного "участка" в режиме полушага.
Шаг №1 (точнее, полушаг №1). В этом состоянии идет ток только через обмотку A-B, причем в направлении от клеммы "A" к клемме "B". Для этого на клемму "А" подается "+" от источника питания, а на клемму "В" - минус. Ток через обмотку поддерживается на уровне 3 Ампера (это предельно-допустимый ток для шагового двигателя PL57H76-3.0-4, возьмем его за 100%). Ротор занимает положение напротив полюсов обмотки A-B. Выводы обмотки C-D закорочены между собой (для снижения явления резонанса, см. ниже):
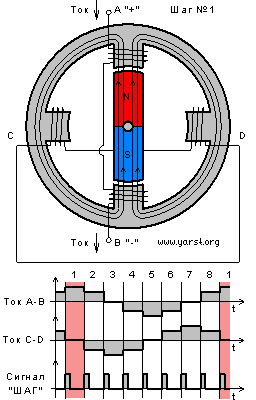
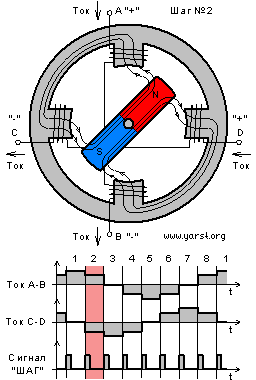
Шаг №2 (полушаг №2). В этом состоянии ток идет сразу через обе обмотки шагового двигателя. Причем, через обмотку A-B ток идет в направлении от клеммы "A" к клемме "B", в то время как через обмотку C-D ток идет от клеммы "D" к клемме "C". Для этого "+" от источника питания подается на клеммы "A" и "D", а минус - на клеммы "B" и "C". Величина тока через каждую обмотку поддерживается на уровне 71% от максимального значения, т. е. на уровне 2.13А. Это связано с тем, что у нас работают сразу обе обмотки, и чтобы не перегреть двигатель мы должны на каждую обмотку давать пониженный ток. Цифра 71% получается из теплового баланса - при этом две обмотки выделяют столько же тепла, сколько одна обмотка выделяла бы при 100% тока.
Когда ток идет сразу через две обмотки, ротор поворачивается на полшага и занимает положение между полюсами статора:
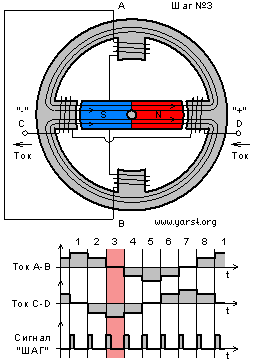
Шаг №3 (полушаг №3). В этом состоянии ток идет только через обмотку C-D шагового двигателя. Направление тока - по прежнему, от клеммы "D" к клемме "C" ("+" источника питания подается на клемму "D", минус - на "C"). Величина тока - 100% (3А). Ротор поворачивается еще на полшага и занимает положение напротив полюсов обмотки C-D. Обмотка A-B закорочена (для снижения явления резонанса, см. ниже)):
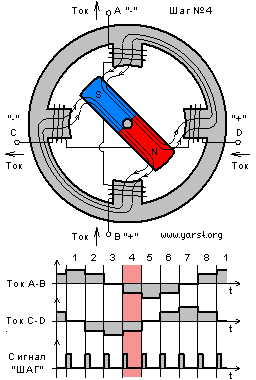
Шаг №4 (полушаг №4). Ток снова идет сразу через обе обмотки шагового двигателя. Причем, через обмотку A-B ток идет уже в направлении от клеммы "B" к клемме "A", в то время как через обмотку C-D по-прежнему от клеммы "D" к клемме "C". Для этого "+" от источника питания подается на клеммы "B" и "D", а минус - на клеммы "A" и "C". Величина тока через каждую обмотку поддерживается на уровне 71% (2.13А). Ротор поворачивается еще на полшага и снова занимает положение между полюсами статора:
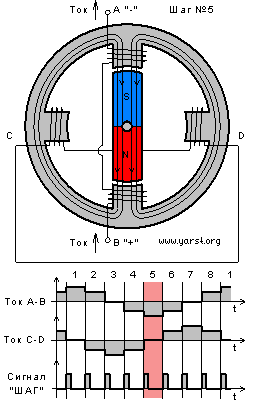
Шаг №5 (полушаг №5). В этом состоянии, как и на шаге №1, ток снова идет только через обмотку A-B шагового двигателя. Но направление тока - обратное, от клеммы "B" к клемме "A" ("+" источника питания подается на клемму "B", минус - на "A"). Величина тока - 100% (3А). Ротор поворачивается еще на полшага и занимает положение напротив полюсов обмотки A-B. Обмотка C-D закорочена (для снижения явления резонанса, см. ниже):
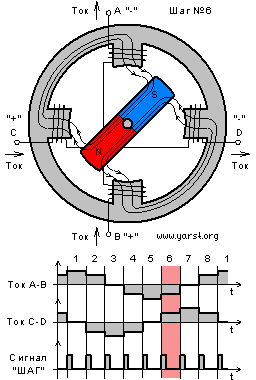
Шаг №6 (полушаг №6). Ток опять идет сразу через обе обмотки шагового двигателя. Через обмотку A-B по-прежнему, в направлении от клеммы "B" к клемме "A", однако через обмотку C-D уже в обратную сторону - от клеммы "C" к клемме "D". Для этого "+" от источника питания подается на клеммы "B" и "C", а минус - на клеммы "A" и "D". Величина тока через каждую обмотку поддерживается на уровне 71% (2.13А). Ротор поворачивается еще на полшага и снова занимает положение между полюсами статора:
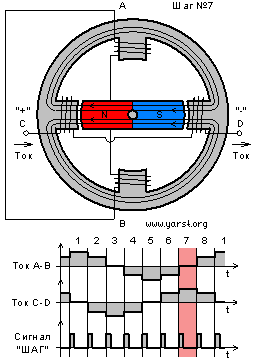
Шаг №7 (полушаг №7). Похож на шаг №3, но с точностью наоборот. Ток снова идет только через обмотку C-D шагового двигателя. Но направление тока - обратное, от клеммы "C" к клемме "D" ("+" источника питания подается на клемму "C", минус - на "D"). Величина тока - 100% (3А). Ротор поворачивается еще на полшага и занимает положение напротив полюсов обмотки C-D. Обмотка A-B закорочена (для снижения явления резонанса, см. ниже):
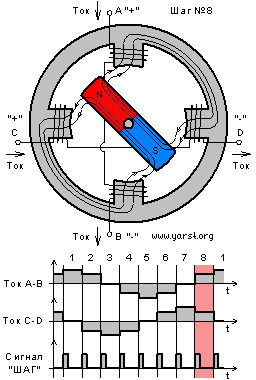
Шаг №8 (полушаг №8). Ток снова идет сразу через обе обмотки шагового двигателя. Но направление его через обмотку снова поменялось. Как на шагах №1 и №2 его направление теперь стало от клеммы "A" к клемме "B". Через обмотку обмотку C-D ток продолжает идти от клеммы "C" к клемме "D". Для этого "+" от источника питания подается на клеммы "A" и "C", а минус - на клеммы "B" и "D". Величина тока через каждую обмотку поддерживается на уровне 71% (2.13А). Ротор поворачивается еще на полшага и снова занимает положение между полюсами статора:
Наконец, с приходом на драйвер шагового двигателя очередного импульса сигнала "ШАГ", текущий "участок" работы шагового двигателя заканчивается, мы переходим в следующий "участок", и снова "встаем" на шаг №1:
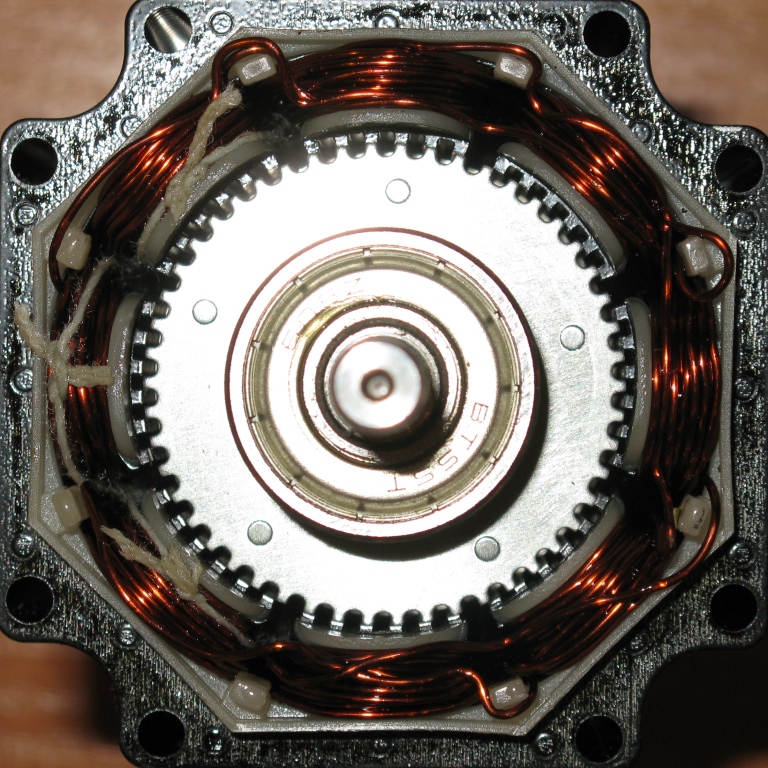
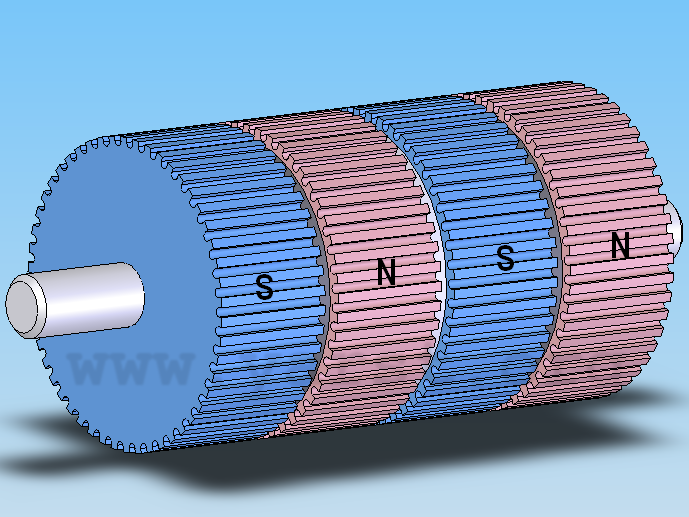
Как же работает реальный шаговый двигатель, и почему он может обеспечить 200 (400) шагов на оборот ротора? Для этого еще раз внимательно посмотрим на его ротор:
Видно, что он состоит из трех одинаковых секций, разделенных между друг другом кольцами из алюминия - алюминий немагнитный материал. Количество секций (1, 2 или 3) зависит от размера шагового двигателя, чем длиннее двигатель - тем больше секций.
Для понимания принципа работы достаточно рассмотреть только одну секцию. Каждая секция, в свою очередь, состоит из двух пакетов электротехнической стали, разделенных достаточно сильным магнитом:
Пакеты имеют по окружности зубцы, таким образом, зубцы одного пакета становятся "южным" полюсом, а зубцы другого пакета - северным. Следует также отметить, что зубцы "южного" и "северного" полюсов сдвинуты друг относительно друга на ползубца:
На статоре тоже есть зубцы, но они не имеют смещения по длине (по оси) и идут ровно на всю длину шагового двигателя:
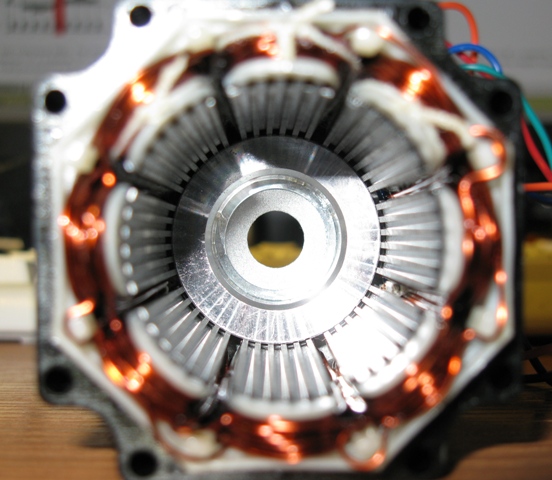
Видно, что двигатель имеет восемь обмоток, эти обмотки соединены в две группы по четыре обмотки в каждой (если тыкнуть в картинку мышкой, она откроется в лучшем качестве):
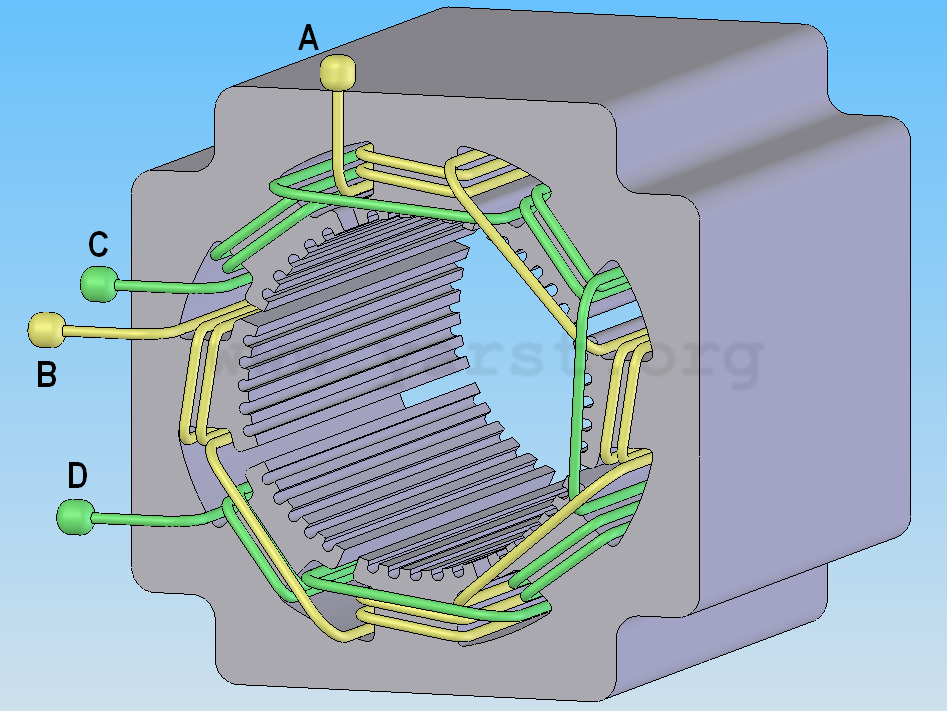
При пропускании тока через одну из групп обмоток (например, через "желтую"), полюса статора намагничиваются, и между ними создается магнитное поле следующего вида:
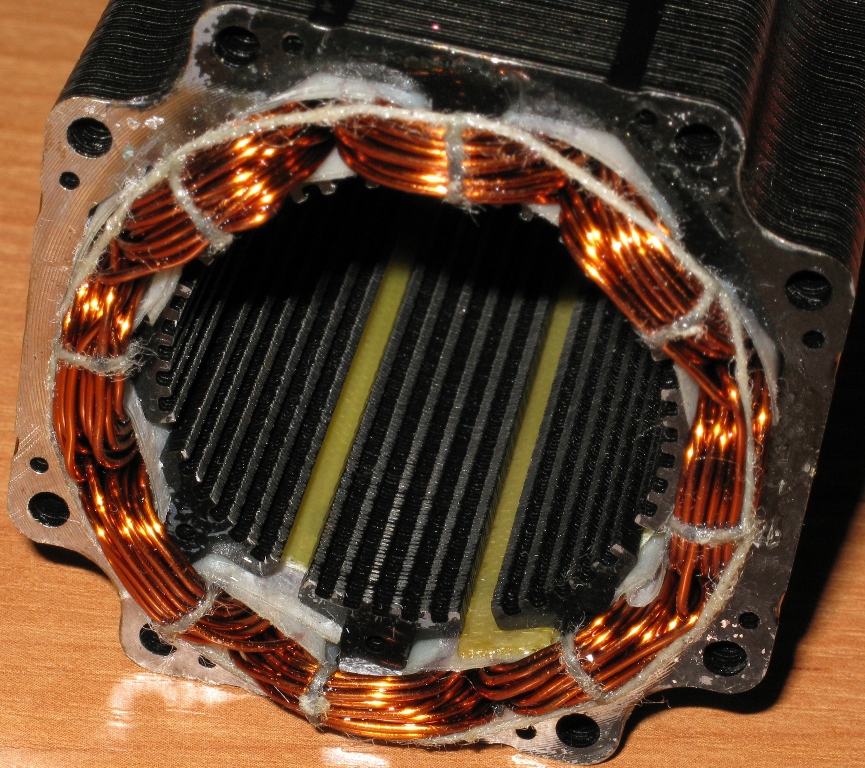
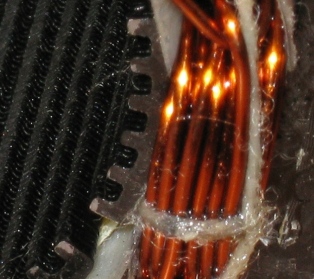
Теперь надо обратить особо пристальное внимание на следующее фото шагового двигателя в разобранном состоянии. Оно делает возможным понять весь принцип работы реального шагового двигателя:
Видим восемь обмоток на статоре. Для удобства их обозначения представим, что это циферблат часов. Так, самую верхнюю обмотку назовем "12 часов", самую нижнюю - "6 часов", и т. д.
Обмотки "12 часов", "3:00", "6:00" и "9:00" - это группа обмоток с клеммами A-B.
Обмотки "1:30", "4:30", ""7:30" и "10:30" - это группа обмоток с клеммами C-D.
Видно, что имеется хорошее совпадение зубцов ротора и статора напротив обмоток "12:00" и "6:00", но поскольку полюса ротора смещены на ползубца, то значит имеется хорошее совпадение зубцов ротора и статора ОБРАТНОГО полюса напротив обмоток "3:00" и "9:00". Это хорошо видно на 3D-модели шагового двигателя в разрезе на картинке ниже (если тыкнуть в картинку мышкой, она откроется в лучшем качестве):
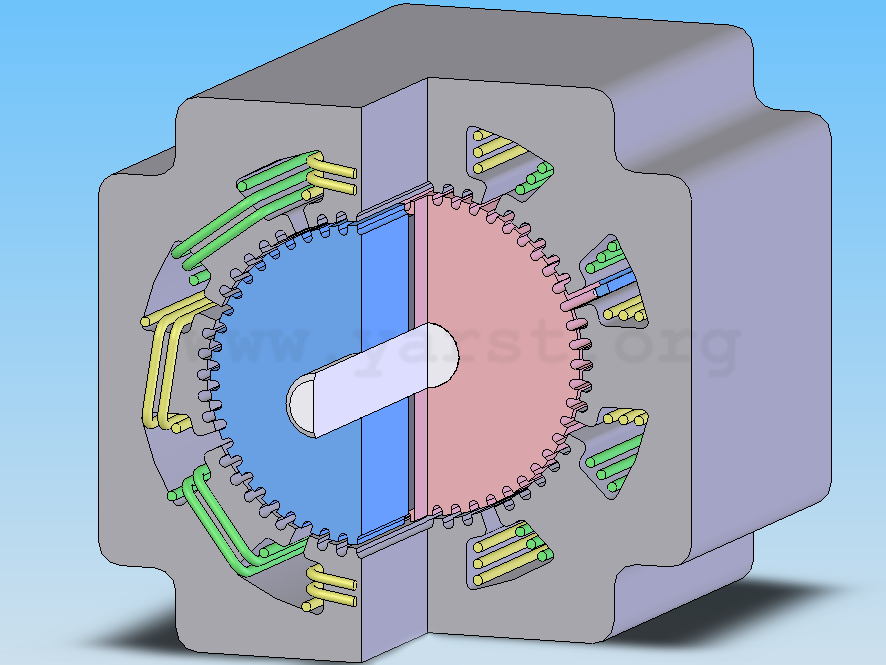
Всё, теперь магнитная система замкнулась, и мы имеем одно из устойчивых состояний ротора шагового двигателя.
Если теперь мы подадим ток в обмотку C-D, у нас намагнитятся полюса "1:30", "4:30", ""7:30" и "10:30", и ротор повернется на четверть зубца вправо или влево (в зависимости от того, какого направления ток будет пущен через группу обмоток C-D). В этом случае, будут четко совпадать зубцы напротив полюсов группы обмоток C-D и ротор займет следующее устойчивое положение. И т. д.
Главное преимущество шаговых двигателей - возможность работы без обратной связи. Нам не нужны датчики положения осей станка, чтобы знать текущее положение этих осей. Мы всегда четко знаем, что если мы дали 100 импульсов сигнала "ШАГ", то наш двигатель повернется на 100 шагов в нужном направлении, и это значит, что данная ось станка переместиться на определенное (строго определенное) расстояние.
Однако, у шаговых двигателей есть и недостатки.
Так, если мы перегрузим оси станка, то силы магнитного поля, создаваемого током в обмотках статора, уже не хватит, чтобы провернуть ротор на нужное число шагов, шаговый двигатель "теряет шаг", и после этого мы уже не сможем точно узнать положение осей станка - обрабатываемая деталь будет "запорота".
Кроме того, шаговым двигателям присуще явление резонанса.
Предпосылкой к резонансу является следующая особенность. Когда мы даем ток в нужную группу обмоток статора, создается соответствующее магнитное поле, которое стремиться "притянуть" ротор в заданное (новое) положение. Это магнитное поле как "резинка" или "пружинка" тянет ротор в новое положение. Ротор начинает поворачиваться к новому положению, ускоряется и стремиться занять свое "новое" место под полюсами статора с током. Но уже набрав некоторую скорость на пути к требуемому месту, ротор "пролетает" нужное положение и проворачивается чуть дальше, чем нужно. "Резинки" магнитного поля стремятся вернуть его назад, ротор замедляется, разворачивается в обратную сторону и... снова "пролетает" место под полюсами. Этот процесс повторяется до тех пор, пока накопленная в роторе механическая энергия не рассеется в подшипниках, магнитной системе шагового двигателя и элементах кинематической схемы станка.
Таким образом, при совершении очередного шага ротор двигателя перемещается в новое положение, но не плавно, а рывком, и начинает совершать возле этого положения затухающие колебания с некоторой частотой:
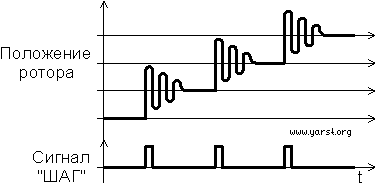
Частота этих колебаний есть резонансная частота. Она не постоянна и будет зависеть от силы магнитного поля (силы тока в обмотках двигателя), а также от инерции ротора шагового двигателя и инерции подсоединенных к нему деталей кинематической схемы станка. Чем больше ток в обмотках и чем меньше инерция кинематической части, тем частота колебаний будет выше, чем меньше ток и чем больше инерция кинематической части, тем частота колебаний будет ниже.
Время затухания будет определятся потерей энергии на трение в деталях привода и потерями энергии в магнитной системе двигателя - чем больше потери, тем быстрее будут затухать наши колебания.
Суть явления резонанса заключается в том, что если мы будем совершать шаги двигателя с частотой, близкой к резонансной, колебания ротора не будут успевать затухать к следующему шагу, и с каждым новым шагом будут набирать силу и увеличиваться по амплитуде. В итоге наступает момент, когда амплитуда колебаний ротора возрастает настолько, что в худшем случае ротор двигателя "срывается" с требуемого положения и шаговый двигатель теряет шаг. И это очень плохо, потому что с этого момента нашу обрабатываемую деталь можно выбросить на помойку, ибо размеры ее будут уже не теми, которые нам нужны, а неизвестно какими.
В более "благоприятных" случаях двигатель не теряет шаг сам по себе, но его крутящий момент на резонансной частоте резко падает, что, в конечном итоге, снова может привести к потери шага, даже при нагрузке, значительно меньше номинальной.
С явлением резонанса нужно бороться! Существует много методов для этого.
В нашем случае используется метод короткого замыкания группы обмоток шагового двигателя, которая не используется на текущем шаге (см. шаги №1, 3, 5 и 7). Дело в том, что колебания ротора наводят в обмотках двигателя ЭДС, и если мы закоротим хотя бы одну группу обмоток двигателя, мы резко увеличим потери энергии ротора при совершении этих колебаний (за счет нагревания закороченных обмоток) и сократим время резонансных колебаний.
Эта мера не позволяет полностью избавится от явления резонанса, но позволяет в значительной мере улучшить ситуацию. Испытания переделанного под ЧПУ станка "Корвет-414" показали, что при любых частотах вращения шаговых двигателей, начиная от нулевой и до максимальной, потери шагов не наблюдается.
Почерпнуть дополнительную информация о работе шаговых двигателей можно также на следующем ресурсе: http://www.stepmotor.ru/articles/.
В особенности полезна (на мой взгляд) статья http://www.stepmotor.ru/articles/stat2.php. Из нее Вы узнаете:
- про виды шаговых двигателей и схемы их подключений;
- более подробную информацию про резонанс шагового двигателя и методы борьбы с ним;
- что такое микрошаговый режим;
- как регулировать и поддерживать ток в обмотках шагового двигателя;
- как самостоятельно собрать простейший драйвер шагового двигателя.
Читайте также:
Общее описание станка и его переделки под ЧПУ. На странице представлено общее описание фрезерного станка "Корвет-414" и описание переделки его механической части;
Электрическая часть. На странице описано размещение электрооборудования внутри переделанного под ЧПУ станка;
Шаговые двигатели (ШД) (эта страница, Вы ее уже прочитали).
© 1995-2019 Ярослав Меньшиков
Материал на страницах этого сайта выложен только для ознакомительных целей.
Любая перепечатка и распространение, использование в коммерческих целях материалов данного сайта возможно только с разрешения и по согласованию с автором.
![]()